人形机器人高壁垒环节:行星滚柱丝杠市场格局梳理
一. 人形机器人核心结构
(1)传动系统:包括电机、减速器、丝杠、执行器,将电能转化为机械运动,决定了机器人负载能力和运动精度。
(2)感知系统:包括视觉模组、激光雷达、力传感器、IMU惯导、触觉传感器等,负责采集外部环境与自身数据。
(3)控制系统:包括主控制器、驱动器、运动规划系统,负责处理感知数据、生成运动轨迹。
二. 丝杠概览
丝杠是将电机的旋转运动转化为负载的直线往复运动的机械部件。
工作原理:电机带动丝杠轴转动,丝杠轴上的螺母在螺纹驱动下实现直线往复运动,从而将电机旋转力矩转化为直线驱动力。
根据摩擦形式,可分为滑动摩擦(梯形丝杠)、滚动摩擦(滚珠丝杠、行星滚柱丝杠):
(1)梯形丝杠
由丝杠轴和螺母组成,结构简单,成本低,但传动效率及精度不高,主要用于普通机床、工程机械、升降设备、自动化设备等场景。
(2)滚珠丝杠
在丝杠轴和螺母间装入钢球作为中间传动件,从而减小运动摩擦。
滚珠丝杠滚动摩擦阻力小、定位精度高,但工艺复杂、制造成本较高,主要用于机器人、数控机床、半导体设备、汽车线控制动、自动化产线等场景。
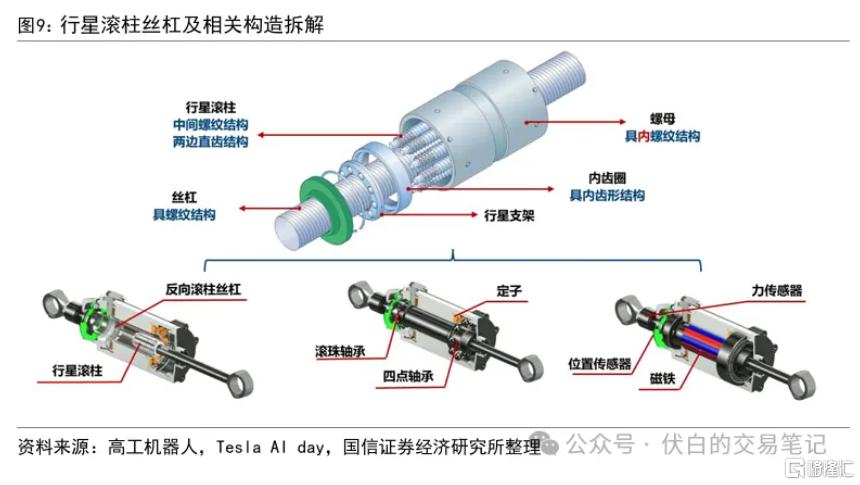
(3)行星滚柱丝杠
滚柱、滚珠丝杠的主要区别是采用带螺纹的行星滚柱替代钢球作为传动介质,提供更多的接触点,从而提升负载、刚度、寿命、转速等性能。
滚柱丝杠技术壁垒高、制造成本高,主要用于人形机器人、航空航天伺服机构、高端数控机床、医疗精密设备等场景。
三. 行星滚柱丝杠在人形机器人的应用
人形机器人关节用于实现机器人运动和动作控制,主要包括旋转关节、线性关节:
(1)旋转关节:包括无框力矩电机、谐波减速器、力矩传感器、编码器、轴承等部件。
(2)线性关节:包括无框力矩电机/步进电机、行星滚柱丝杠、力矩传感器、编码器、轴承等部件。
行星滚柱丝杠在线性关节执行器中,可用于滚珠丝杠无法满足的重载场景:
以特斯拉Optimus Gen 2为例,单台设备共搭载14套行星滚柱丝杠(大臂2个、小臂4个、大腿4个、小腿4个),使用的是瑞士GSA产品。
四. 行星滚柱丝杠市场格局
全球市场长期由欧美企业主导,呈寡头格局:GSA(瑞士,并购Rollvis)、Ewellix(瑞典,舍弗勒旗下)、博世力士乐(德)。
国内方面,处于小批试产、送样阶段的厂商包括:五洲新春、北特科技、恒立液压、贝斯特、震裕科技、双林股份、江苏雷利。
SH 五洲新春
格隆汇声明:文中观点均来自原作者,不代表格隆汇观点及立场。特别提醒,投资决策需建立在独立思考之上,本文内容仅供参考,不作为实际操作建议,交易风险自担。


